项 目
型号或主要参数
外形尺寸(长×宽×高)
130cm x 90cm x 110cm
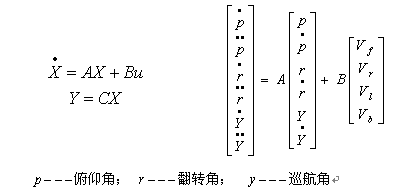
俯仰角
-150~150
翻转角
巡航角
任意角度
电源输入
AC220V 50HZ 2A
运动控制器
GT-400-SV
永磁直流电机
24V 5000RPM
俯仰编码器
1000P/R
翻转编码器
巡航编码器
600P/R
集电环
18线
产品代码
产品名称
产品描述
GHP3001
四旋翼飞行仿真器
AHP-MB-3001 四旋翼飞行仿真器本体 GT-400-SV-PCI-EDU GT-400-SV型运动控制器 S-UP-MAT 固高Simulink通用软件实验平台
使用对象:
本实验系统适合本科生、研究生以及控制理论研究者进行控制理论如最优控制、鲁棒控制等理论验证和研究。